[VIP第1年] 指数:3
[VIP第1年] 指数:3
eVTOL是指电动垂直起降飞行器,大力开展eVTOL试点,是对低空经济的强动力注入,而无人机正是这一领域的关键选择之一。无人机在低空经济中扮演者重要角色,随着应用领域的不断增多,未来无人机的数量将呈式增长,届时eVTOL起降中心将聚集众多各式各样的无人机,如何高效有序的让无人机彼此工作而不互相干扰是行业值得思考的一件事。当许多无人机需要同时起飞执行不同的任务时,如果操控不当,或者收到外力影响,就容易出现事故,而人为的反应毕竟有延后,不可能做到完全的补救操作,因此无人机自身的规避措施建设一样重要。特殊目标的识别精度如何提高?成都智慧交通AI智能算法分析厂家

目标识别算法是一种深度学习算法,其聪明程度需要我们不断训练,这就得益于大量的图像标注,通过对车辆行驶环境的数据集的大量标注,能够让AI更加聪明,标注得越多,识别的精度就可能越高。但是大量的图像标注跟工作显然会耗费大量的时间精力。而慧视SpeedDP的出现很好地解决了这个问题。SpeedDP是一个深度学习AI算法训练开发平台,他能够通过现有的算法模型或者自训练一个算法模型,实现对新数据集的快速AI自动标注,以此反复,帮助使用者提升算法性能。能够有效节约大量的时间。成都智慧视觉AI智能算法分析项目外场测试可以利用SpeedDP进行快速自动标注。

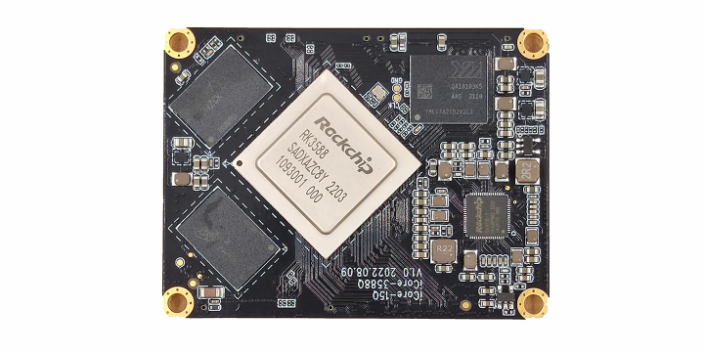
成都慧视开发的Viztra-HE030图像处理板就是一款采用了瑞芯微旗舰级芯片RK3588的高性能板卡,具备八核处理器,至高能够输出6.0TOPS的算力。通过对接口的定制开发,就能够应用到城市的各个领域。有了高性能的Viztra-HE030图像处理板这样的硬件支持,还需要针对于不同的应用场景定制专属的识别算法。例如在城市安防巡逻中,执法人员采用无人机进行高空执法,就需要无人机能够进行实时识别、动态跟踪,并且根据特殊需求执行特殊任务。这都需要高精尖的算法支持。
无人机在农业领域能够实现高效率的施肥、播种等操作。但是不同的作业环境对于无人机的工作性能要求不一样,同样的方案在平原地区适用,在高原地区就不行。因此针对于特殊作业环境需要制定不同的智慧化方案。像青藏高原这样地貌复杂、低气压、大温差的特点,参与智能化工作的各个部件需要符合这样作业环境特点的性能要求。不比平原的一马平川,高原由于环境复杂,地形起伏对于无人机的飞行也需要进行控制,无论是高度还是速度甚至距离都需要进行严格限制,防止出现撞机等事故。因此,这个方面的智慧化建设就需要无人机具备智能避障的功能,无人机需要在高速度或者远距离的情况下识别树木、电线杆、石头等障碍物,并能够实现避障。图像标注是一项繁琐的工作。

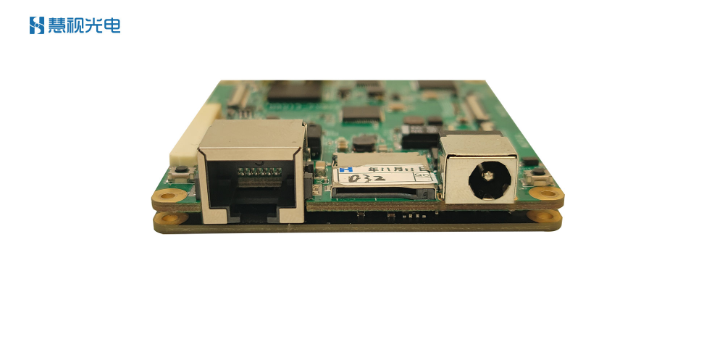
无人机夜间工作时需要依靠红外机芯进行高清成像,而想要具备AI检测识别的能力则可以通过植入图像处理板。成都慧视可以根据需求提供整套的建设方案,实现快速集成开发。慧视Viztra-LE026图像处理板+MiNO 17红外机芯的组合方案,两款产品均使用小巧设计,整体组合重量在30g左右,并且都采用小功耗设计,用在无人机领域不会过多增加负担。在算法的赋能下,能够实现稳定的目标检测识别。Viztra-LE026图像处理板重量在10g左右,采用了瑞芯微全国产化芯片RV1126,能够输出2.0TOPS的算力,功耗不高于4W。能够以30Hz帧率跟踪像素2*2的目标,能够识别像素为12*12的目标,且识别率高于85%。而MiNO 17红外机芯重量在20g左右(净重5g(不含镜头)),像素分辨率为640*512,采用9/13/25mm三种定焦设计,支持18中伪彩选择,功耗小于0.75W。如何提升FPV识别跟踪的精度?成都深度学习AI智能算法分析
算法的提升得益于大量的图像标注。成都智慧交通AI智能算法分析厂家
腾讯开发的机器人小五,采用轮、腿、足复合设计,使得它具备越障能力的同时,也保持了轮式机器人的运行效率。每条腿都可以单独伸长缩短,能有效提升承载能力。装上了双编码器大扭矩密度的执行器后,就能承受住一般成年人的重量。将机器人用于养老服务领域,能够帮老人取快递,抱老人起床,带老人进行活动。机器人内置RGBD相机,在图像处理板的赋能下,能够实时检测周边环境,进行路线规划和避障,以高效完成各项工作指令。同时能够对物体进行AI识别,判断老人位置、行为动作,为老人的行动做出帮助。成都智慧交通AI智能算法分析厂家
文章来源地址: http://dzyqj.huagongjgsb.chanpin818.com/chuanganqisr/sjtxcgq/deta_27233345.html
免责声明: 本页面所展现的信息及其他相关推荐信息,均来源于其对应的用户,本网对此不承担任何保证责任。如涉及作品内容、 版权和其他问题,请及时与本网联系,我们将核实后进行删除,本网站对此声明具有最终解释权。