[VIP第1年] 指数:3
[VIP第1年] 指数:3
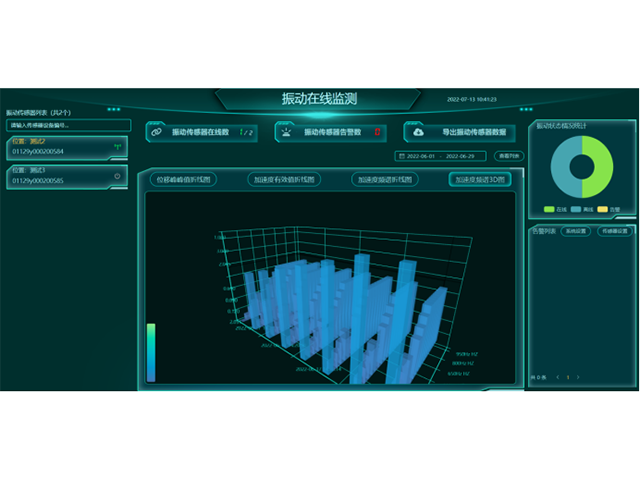
矽睿半导体在电路设计、半导体器件及工艺设计、可靠性设计等方面已积累了众多技术,电源管理的应用,在锂电池保护,充电放电管理,过压过流保护以及升降压管理等应用上研发出许多高性能的产品系列;数字解码协议芯片,触摸感应芯片均有高性价比的产品,在TWS行业,矽睿半导体的磁传感器芯片(霍尔开关芯片)更是行业生产商的主要应用器件。作为矽睿创建之初主销产品的场效应功率芯片,更是发展出各类通用及特殊封装外型,已研发出各类参数规格上百种的型号;除此之外, 矽睿更能用自身在半导体封装,芯片研发以及电路应用上的多年专业经验,根据客户的产品电路和要求,将数字,模拟及功率芯片进行集成化,以解决客户的需求痛点。矽睿科技IMU算法配合气压等传感器,加上先进的融合算法能让这些复杂监测成为可能。QMC6308-FMWLCSP-4全新原装
斜率定义为两个相邻时间点的加速度计值:Slope(t2)=(????????????(????2)−????????????(????1)),输入允许是XYZ的任意一轴或者多轴的组合,需要设置斜率的阈值(Threshold)以及超过该阈值需要持续的时间(Duration),如果芯片检测到符合这个设置的波形,将会提供一个中断给微处理器,微处理器可以通过读取相关的中断寄存器确认是Anymotiondetection中断,并可以读取状态寄存器获取下面信息:1)先满足触发条件的是哪个轴;2)触发的信号是正方向的还是负方向的。阈值(Threshold)与持续时间(Duration)的设置依赖于芯片的ODR,对于Anymotiondetection的检测,可以以较低的ODR实现,而较低的ODR可以获得良好的功率控制。Duration可以选择的点数目多4个点,阈值小为16LSB(),阈值大为4G@FS=+/-8G,因此该检测器可以检测很小的运动,也可以设置为检测很强烈的撞击,可以根据应用的需求进行相应的设置。 QST代理QMC6309地磁为了防止因牵引力,翻倒和碰撞造成的事故,QST提供了先进的惯性和惯性GNSS模块。
上海矽睿的加速度传感器堪称其明星产品之一。它采用先进的 MEMS 工艺制造,具备***的灵敏度和稳定性。在可穿戴设备领域,该加速度传感器能够精细捕捉人体运动的细微变化,助力实现步数精细计算、运动姿态识别以及跌倒检测等功能。比如,在智能手环中,它能实时监测用户的运动状态,为用户提供专业的运动数据和健康建议,帮助用户科学规划运动计划。在汽车安全系统里,加速度传感器则发挥着至关重要的作用,当车辆发生碰撞时,能迅速感知到加速度的剧烈变化,及时触发安全气囊,为驾乘人员的生命安全保驾护航。
量程是指加速度计可以测量的加速度范围,超过该范围输出将饱和,对于普通的应用,一般情况下+/-8G已经可以满足要求,一些特殊的应用比如洗衣机震动检测,撞击检测等要求高G的需求,QMA7981提供了+/-32G的量程范围可以选择。应用中量程的选择的还与加速度计的分辨率(Resolution)以及噪声指标有关,在同样的ADC分辨率下,量程增大一倍,实际的灵敏度LSB/g将减小一半。QMA7981在+/-32G量程下的分辨率为3.9mg/LSB。2)分辨率(Resolution)加速度计的分辨率提高有助于分别精细化的动作,分辨率从早期的6bit,8bit,10bit逐渐提升,目前以14bit为主流。加速度计的分辨率提高的需求也与手机上陀螺仪数据融合的要求有关(目前安卓要求分辨率比较低14Bit)。QMA7981具有14bit的分辨率。降低了这些传感器的价格,推动了这些传感器在其他领域的大量应用。
矽睿科技首席技术官万虹博士表示:“矽睿科技作为传感器企业对于传感器数据融合及后续处理有着深度的理解,采用业界的算法架构和IAF融合引擎确保了矽睿科技室内定位系统相对于其他类似系统的技术优势。并借助姿态判断的结果(例如对步行和跑动适用不同的系数)进行更加准确的步长估计。通过多人进行的实际测试表明,矽睿科技自主研发算法完全达到了水平。距离估计误差的典型值小于行进路程的5%。”“随着更多新型移动设备比如手机、平板电脑、可穿戴设备等,物联网设备的性能飞速增长和基于位置感知的应用的激增,位置感知发挥了越来越重要的作用。上海矽睿科技的加速度传感器可以提供静止检测、运动检测、屏幕翻转、位置、单双击,计步,抬手亮等等功能。QMC6308-FMWLCSP-4全新原装
矽睿科技的三轴磁传感器QMC7983是一款AMR与ASIC集成的三轴单芯片磁传感器。QMC6308-FMWLCSP-4全新原装
运动状态下的姿态角的计算,需要将线性加速度去除后再进行计算,常用的方法是对加速度计数据进行低通滤波(例如gravity[x]=alpha*gravity[x]+(1-alpha)*acc_data[x];),从而获取与重力加速度相关的Gravity的值,然后再计算Pitch/Roll角度。在复杂运动状态下,依靠加速度计估算线性加速度从而获得真实的重力值,目前尚无性能特别好的办法,要求高的可以采用IMU惯性单元做数据融合,依靠陀螺仪数据确认夹角。(详细软件算法包:请找QSTFAE申请)利用加速度计传感器,测量物体沿着某个平面的移动距离,可以采用低通滤波器去除重力加速度后获得线性加速度,然后通过对线性加速度进行二次积分获取设备的移动位置,从而判断设备是否被移动,在车辆的防盗应用中有应用需求,在该种应用中,考虑到加速度计的采样速率,震动噪声以及加速度计二次积分的误差,需要增加一个启动阈值判断和终值零速判断,从而提高精度减小误差。QMC6308-FMWLCSP-4全新原装
文章来源地址: http://dzyqj.huagongjgsb.chanpin818.com/chuanganqisr/qtcgq/deta_27823143.html
免责声明: 本页面所展现的信息及其他相关推荐信息,均来源于其对应的用户,本网对此不承担任何保证责任。如涉及作品内容、 版权和其他问题,请及时与本网联系,我们将核实后进行删除,本网站对此声明具有最终解释权。